Often we want to perform simulations involving contact. There are different types of contact which can be categorized in two categories:
Linear Contacts:
- Bonded contact
- Cyclic contact
- Sliding contact
Non-linear Contact:
- Physical contact.
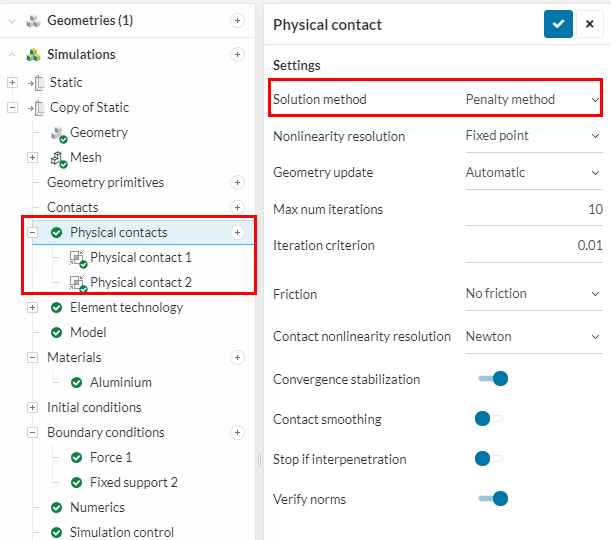
CodeAster offers all the above types of contact. For physical contact simulations we have two choices for CodeAster:
- Penalty method
- Augmented Lagrange method
We suggest the user to use Penalty method for CodeAster. The only tricky part is to set the parameters for the contact.
\underline{\textbf{Physical Contact Settings (Global)}}
\underline{\textbf{Contact Settings (Local)}}

To obtain good results, the slope should be 5-50 times of the Young modulus. As the default material in SimScale platform is steel, therefore we choose slope K = 1e12. The larger this value, the harder is the contact. A good value for tension at larger clearance is 0.25% of the maximum expected stress in the model.
The penalty coefficient is the artificial stiffness added that prevents the master and slave to penetrate within each other. SimScale default values works for the default material i.e. steel. One can also add fictitious clearance if the master and slave surfaces are already penetrating within each other before the start of simulation.
The best steps to get success with physical contact simulations are as follows:
-
Always start with penalty contact for CodeAster
-
Always use auto time stepping scheme for CodeAster. This helps to break the time steps if the simulation does not converge in the prescribed interval
-
Always add friction after the friction less contact simulation has converged
-
Always start with 1st order mesh and then move to 2nd order mesh if necessary.
Read more about contacts in our documentation: Contacts & Interfaces in Solid Mechanics and CHT | SimScale
Happy SimScaling!
Jousef