Verification of Setup for Aerodynamics
BrUAS - Who are we?
We are a a team of students working on a project run by the Institution of Mechanical Engineers called the UAS challenge. This challenges gives teams the opportunity to design, build test and compete their solution to a problem in the form of an unmanned aerial vehicle. Our team is excited to be sponsored by SimScale and are determined to show how we use SimScale to be successful in this challenge.
Introduction
It is a common for users to believe that once a software has been validated to produce realistic results, that a user can simply mesh and simulate their designs, and be returned with accurate results. Unfortunately this is rarely the case, and regardless of your experience level, you could be subject to poor results without knowing unless a verification of your methodology had taken place. In terms of cost, you could design something that works on paper, but due to poor analysis, the product does not work and is only discovered at the end of development.
The most responsible approach to development is understanding the validated results, verifying your own setup, and relying on the methodology developed to give good results through the development of the product, whilst periodically verifying results.
Therefore, this project will set about developing the methodology for reliable results, observe what settings are sensitive to sensible results, and what kind of accuracy can be achieved using a realistic mesh. By a realistic mesh, we mean a mesh that, at density, could be achievable in 3D full wing or even full aircraft scale.
Objectives
- Build on Ali’s validation case for NACA 0012 to validate drag coefficients and a more complete set of angles of attack up to and including stall.
- Understand the numerical schemes and setups that lead to good results
- Observe the accuracy of various meshes to determine a realistic limit and the expected accuracy associated.
- Understand how Y+ values effect results, and set realistic Y+ targets for a 3D mesh.
Mesh
Discretisation error is a common and well-known cause of inaccurate results, and a well-known solution is to perform a mesh independence study, this, in essence, determines at what point mesh fineness stops dramatically effecting results and therefore any finer would be a waste of computational resources. It is, therefore, necessary to take several meshes and observe the lift and drag results on these meshes.

Figure 2: Mesh finess effecting lift and drag values.
With lift remaining fairly constant at above 97% accurate, it is safe to say that it is already mesh independent, however, drag being very small values, the smallest change in accuracy a greater percentage effect. Therefore, throughout the study, it significantly increased from approximately 80% accurate up to approximately 97%. For efficiency sake, when 3D shapes start getting mesh, 90% accuracy from the experimental result could be afforded.

Figure 3: Mesh used in validation, where yellow is the hex-dominant mesh, whereas purple shows the inflated mesh layers around the geometry. The surface of the aerofoil shows Y+, the non-dimensional wall distance.
The above figure of the used mesh shows that a significant amount of layering was required as to not cause the mesh size in terms of number of cells to go too high, as a result the cells at the wall have an extremely high aspect ratio, whereas the cells at the final layer have a low aspect ratio, and approximately the same volume as the surrounding mesh. Y+ was reduced to around 1 so that the viscous sub layer could also be resolved, this was all obtained using the standard wall model.
Results
To gauge accuracy, results were obtained from two sources, the first, (IRA H. Abbott and Albert E. Von Doenhoff, 1958) where experimental results for both lift and drag were taken the second, a more recent paper (Sorribes Palmer et al., 2018) provided a clear graph containing experimental results originally from NASA, but more importantly, an openFOAM validation of several aerofoils including the selected NACA 0012 to provide an expected minimum accuracy of which we could achieve.
The expected results were obtained using the K-omega SST model, as were our results on the SimScale platform, this model is known for its accuracy in such an application and provides good wall modelling across a large range. As most RANS models, however, its accuracy is expected to drop off as the stall is approached due to the accuracy that is available when flow separation occurs. The solution to this would be to use a transient model where even URANS is known to improve this accuracy. This can be visualised in the comparison below of an aerofoil at an AoA of 20 degrees, where the first is solved as a steady problem the second transiently.


Figure 4: Comparison of an aerofoil at 20 degrees AoA, solved in steady state (top) and transiently (bottom).
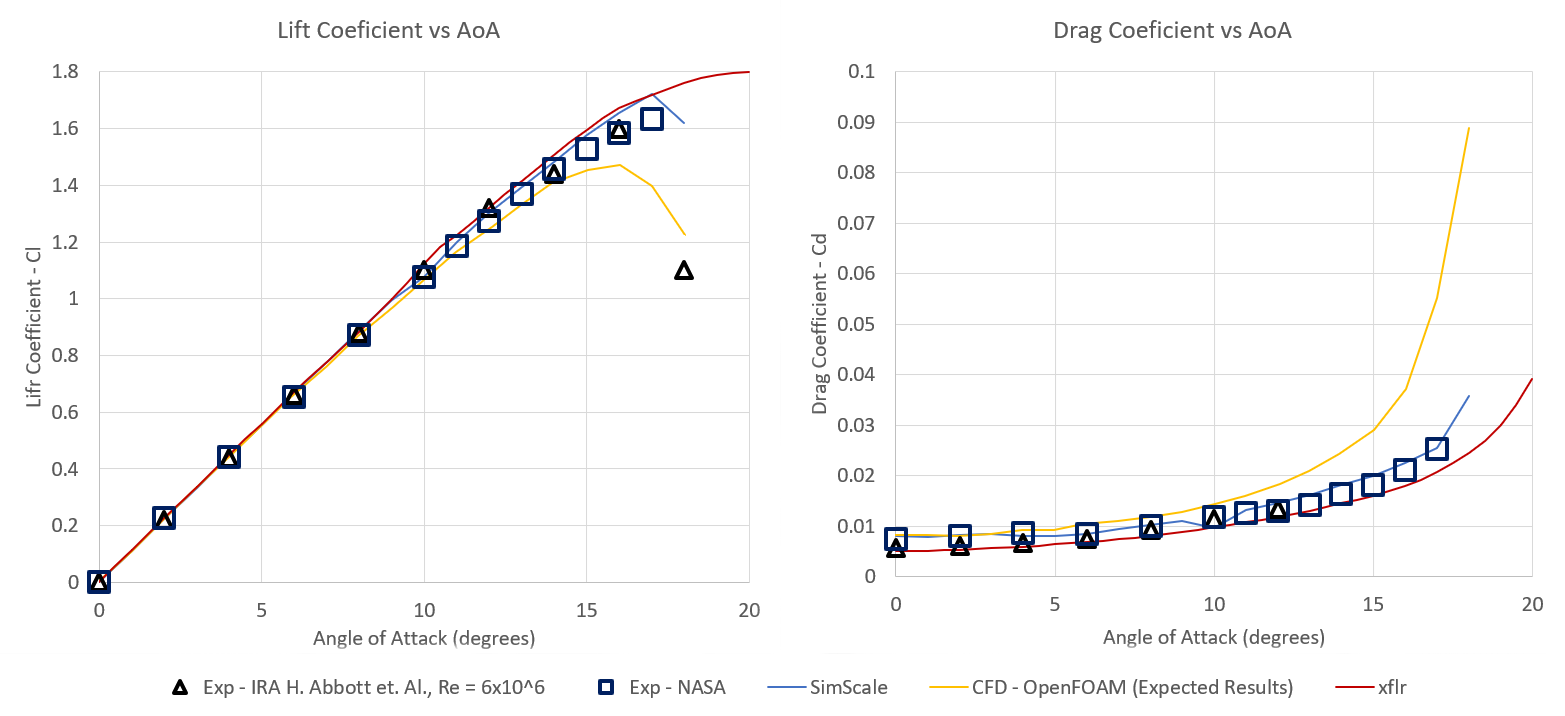
Figure 5: Experimental results, Expected results and SimScale CFD results. XFLR5 results also included for comparison. NASA and OpenFOAM expected data from (Sorribes Palmer et al., 2018) and other experimental data from the well-regarded book ‘Theory of Wing Sections’ (IRA H. Abbott and Albert E. Von Doenhoff, 1958).
The results show that the methodology, solver and mesh used exceeded expectations pretty much everywhere, with an exception at 18 degrees where the drop in lift reported in (IRA H. Abbott and Albert E. Von Doenhoff, 1958) were achieved closer in the expected results (Sorribes Palmer et al., 2018) whereas, leading up to the point it could be argued we continue to exceed the expected results. Most significantly to note is the continued accuracy achieved in drag calculations.
Numerics
Results were surprisingly sensitive to certain numerical schemes, where they made the difference between a failed validation and perfect validation. The reason is that higher order schemes are less susceptible to error when a coarse mesh is used, and the default Bounded Gauss Upwind (first order) divergence scheme for velocity was the sensitive scheme. Despite the name, Gauss linearUpwind is a second order (Tobias Holzmann, 2017) scheme, and produced the validation results shown above.
In addition to this, smooth reached steady state very slowly and sometimes results were mistaken to be converged since the change was very minimal across iterations, PBiCG remained stable and converged faster in most cases.
Conclussions
The SimScale platform as originally proven by Ali Arafat, validate well for lift, and now shown, also validates well for drag values. The numerics, mesh and boundary conditions required to setup such a case have been verified to reproduce results that have been proven time and time again to validate well. We can now move forward in confidence to be able to reproduce results similar to those obtained experimentally and know the limitations of the setup and where extra allowances need to be made to tolerance (nearing stall for example).
References
IRA H. Abbott and Albert E. Von Doenhoff (1958) Theory of Wing Sections. 2nd edn. New York: Dover Publications.
Sorribes Palmer, F., Donisi, L., Pindado Carrion, S., Gómez Ortega, O. and Ogueta Gutiérrez, M. (2018) Towards an airfoil catalogue for wind turbine blades at IDR/UPM Institute with OpenFOAM.
Tobias Holzmann (2017) Numerical Schemes. (Accessed: 01/11/2018).