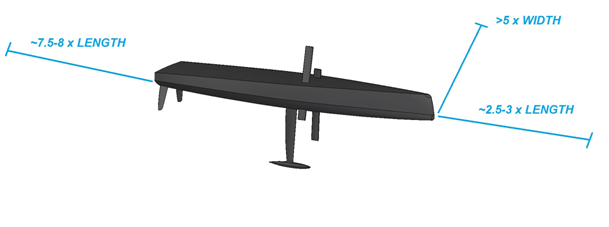
MODEL POSITIONING
O, now positioning looks much better to me.
Also @quequen let’s don’t push it too much at this stage  Personally I prefer step by step approach. To me it was obvious from the very beginning the model is firmly set in its position. I get your point in terms of tilt (heel?), draught etc. but let’s solve one thing at the time.
Personally I prefer step by step approach. To me it was obvious from the very beginning the model is firmly set in its position. I get your point in terms of tilt (heel?), draught etc. but let’s solve one thing at the time.
Adding tilt is not a problem with cut-cell mesh. Releasing some degrees of freedom may be problematic. In longer term however, yes – definitely. But now, I’d like to see full convergence and full control of the free surface.
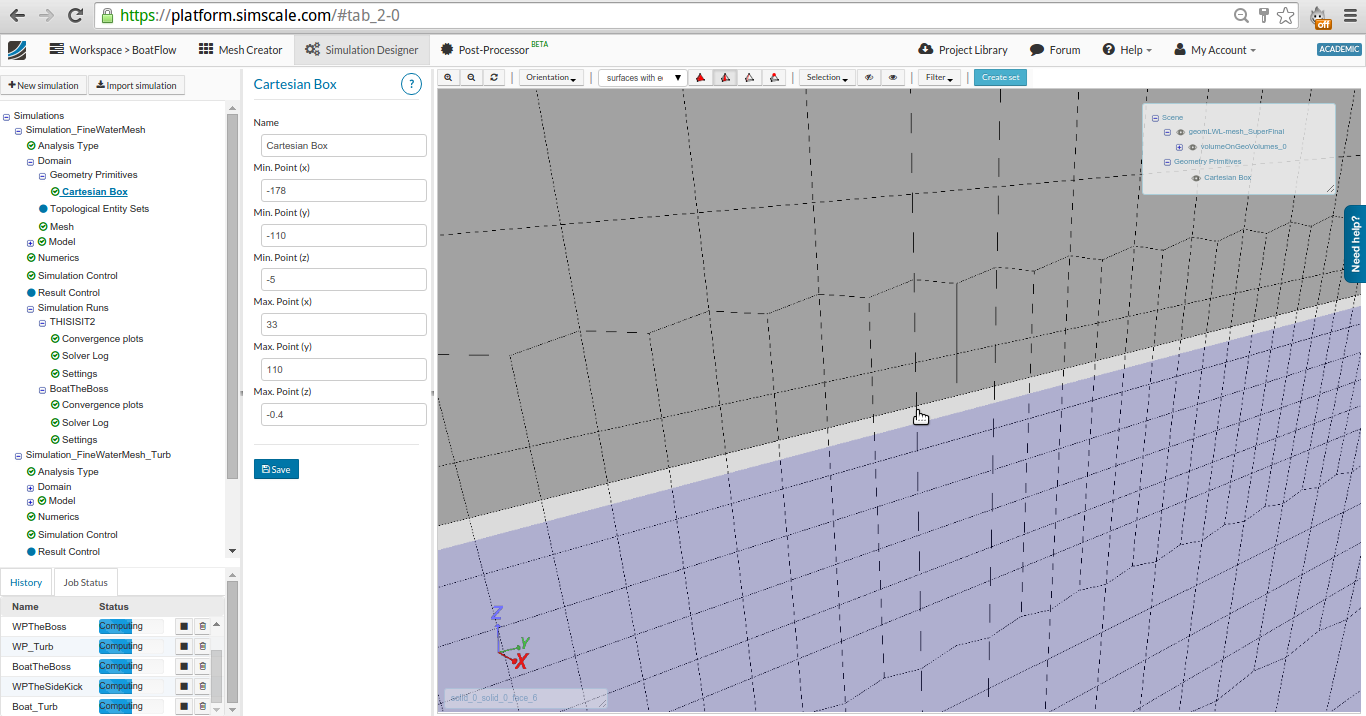
INLET CUT
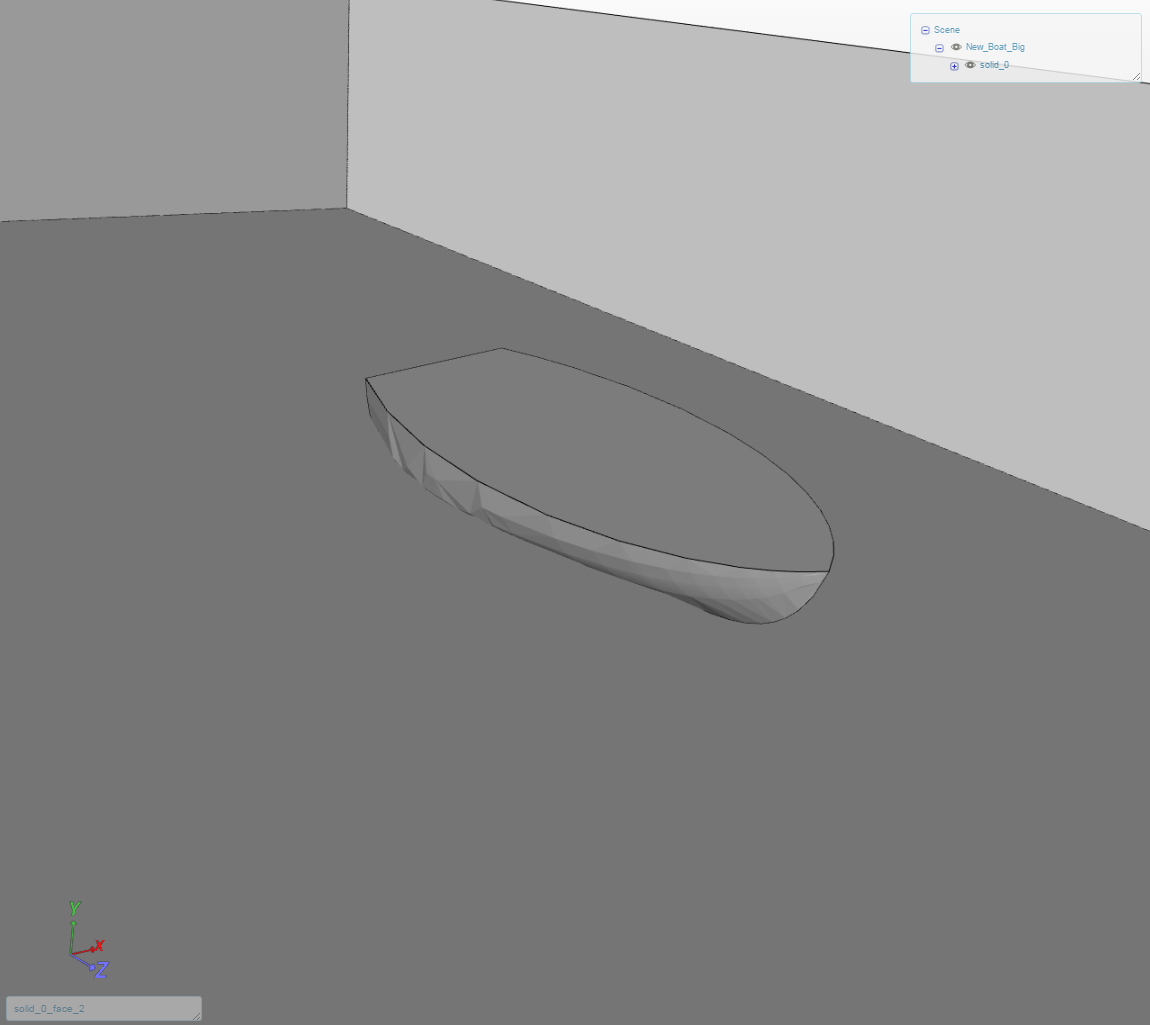
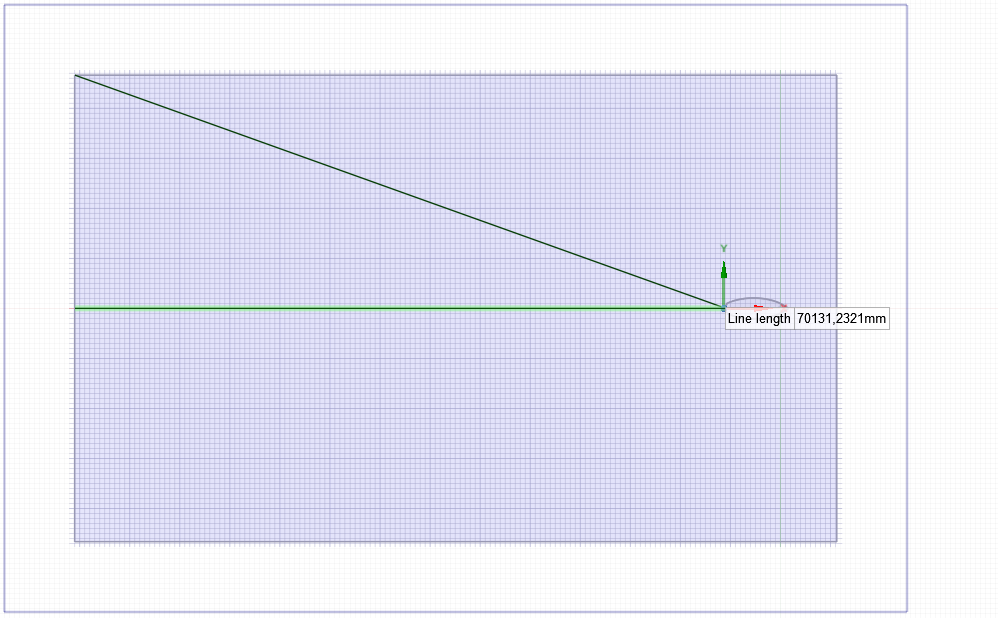
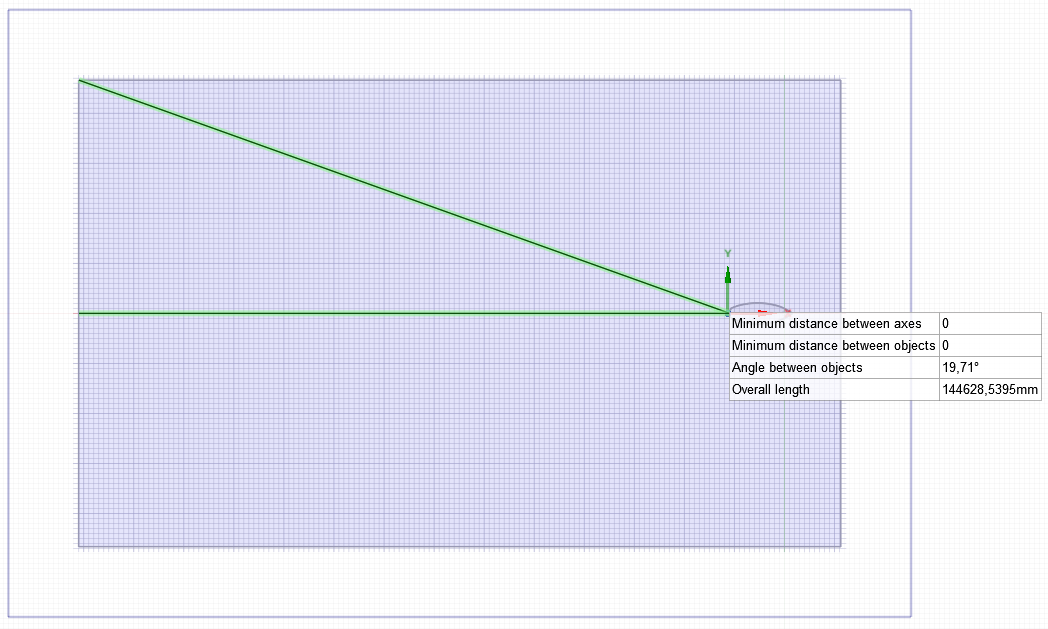
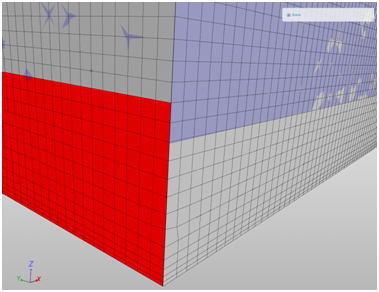
You know what @sjoshi? I also experienced this strange issue at the inlet you had. But in my case I created my domain in CAD program, then cut the inlet surface into two surfaces so that I could later on define them as air and water inlets and only then exported and meshed.
Mesh was generated with no problems. Even mesh division fits to surface division.
(gray – model | red - water inlet surface | light blue – air volume)
Obviously both the surface cut and air/water volume division are at the same height.
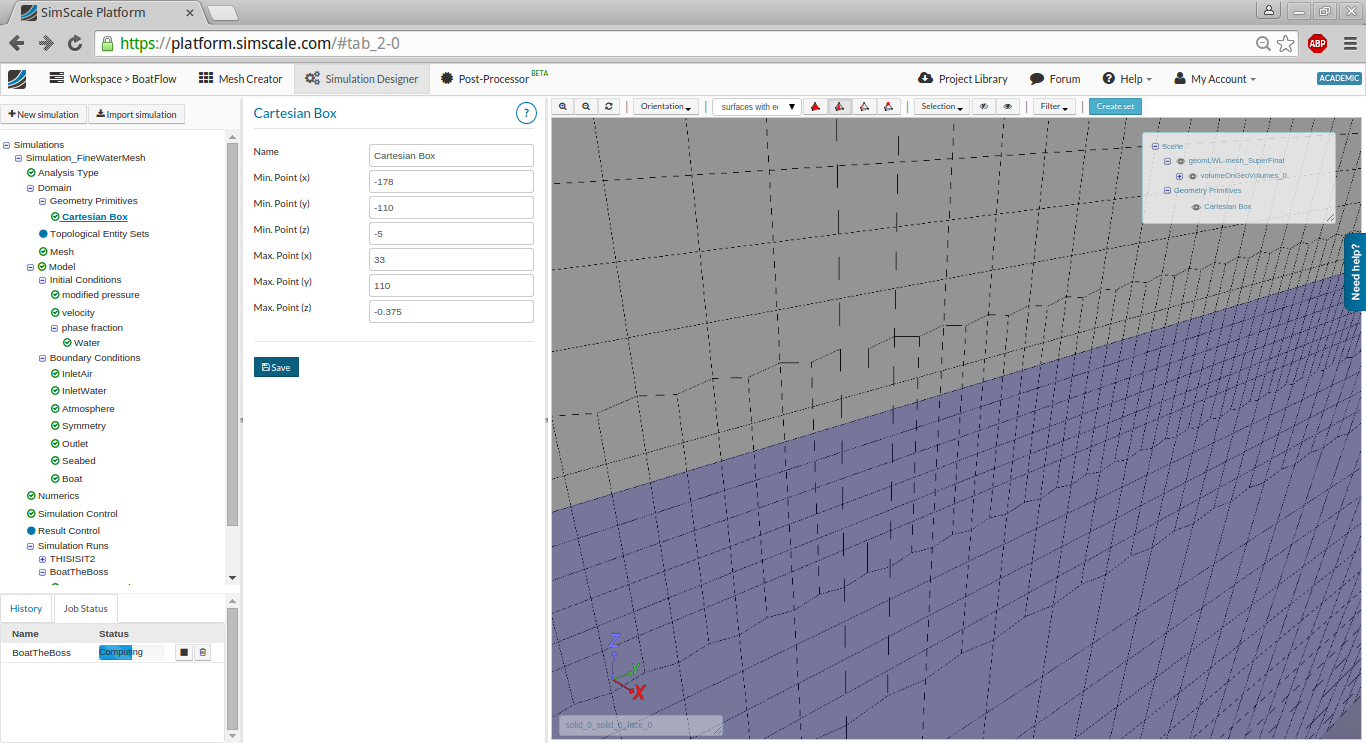
I don’t know if it has any significant influence on simulation’s run, but to the record:
step zero
final step (for this particular simulation)
SIMULATION TIME STEP
Previously, based on your animation, I’ve assumed your step was 0.1 [s]. Now, I tested it and see that it was around 0.005 [s]. - It’s just a small clarification.
MODEL
Is it a surface model? In that case, now I understand why @quequen was so keen on z-direction degree of freedom. Why did you decide to run it like this? Any particular reason?
Make your life easier and close it 
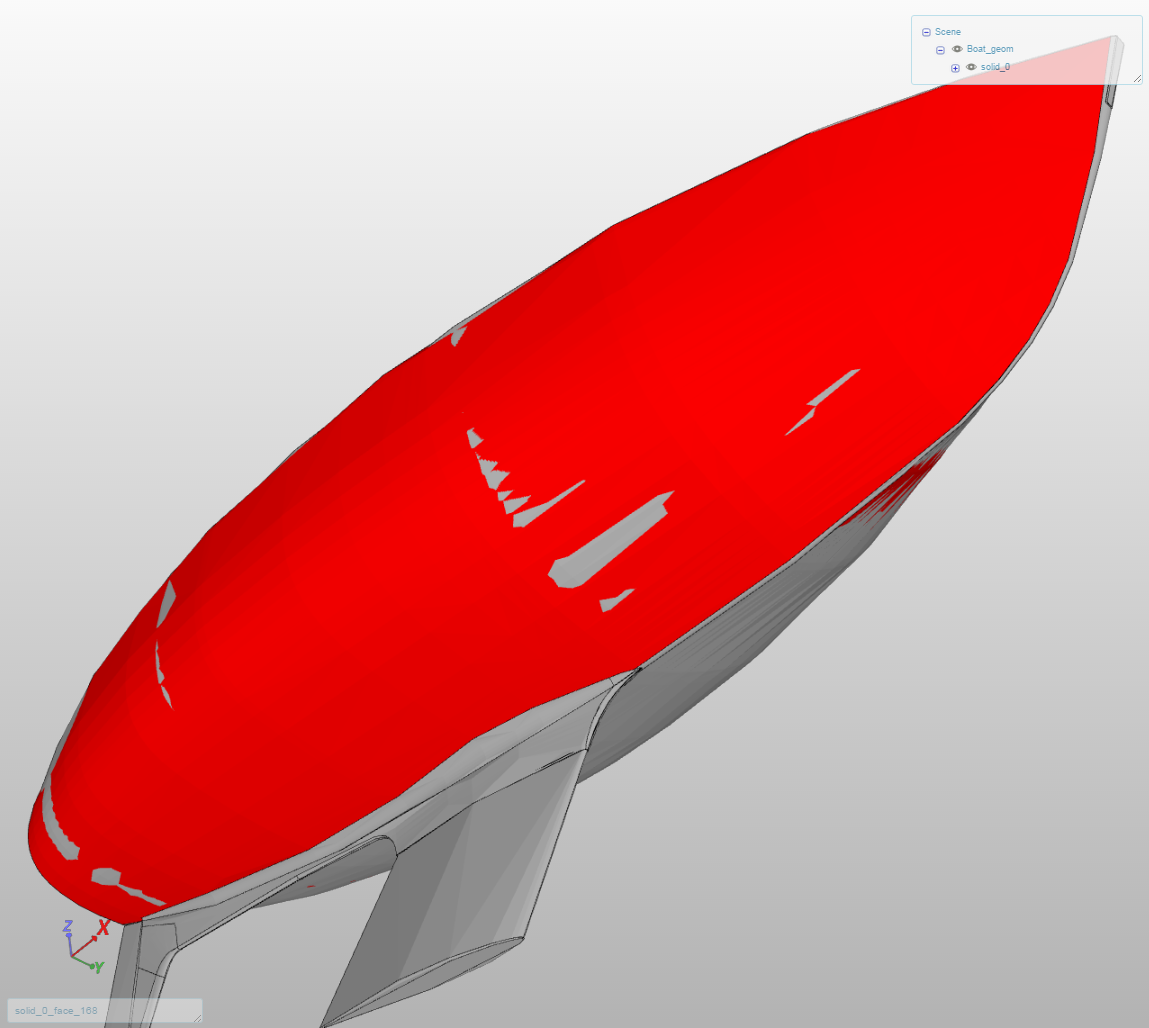
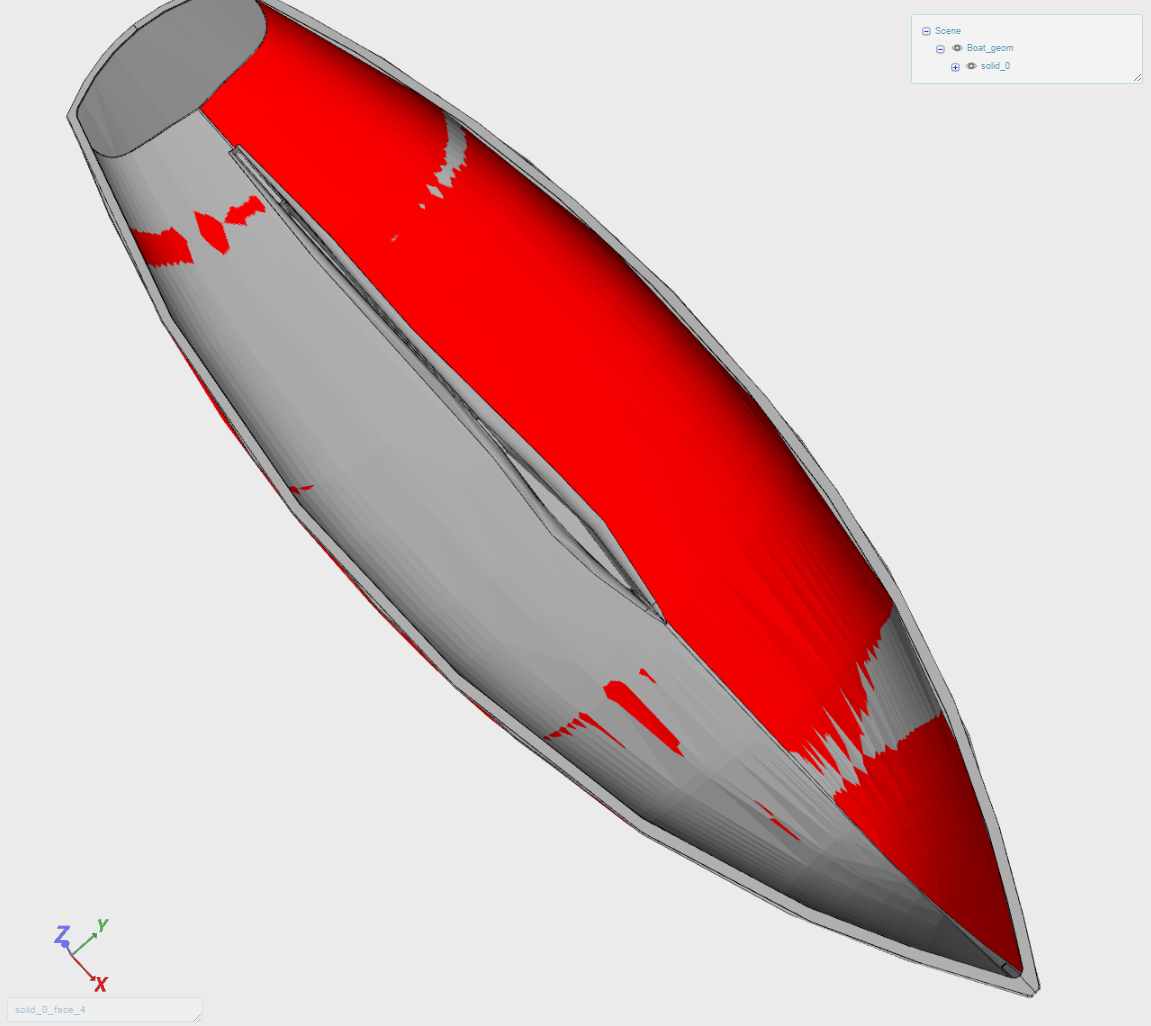
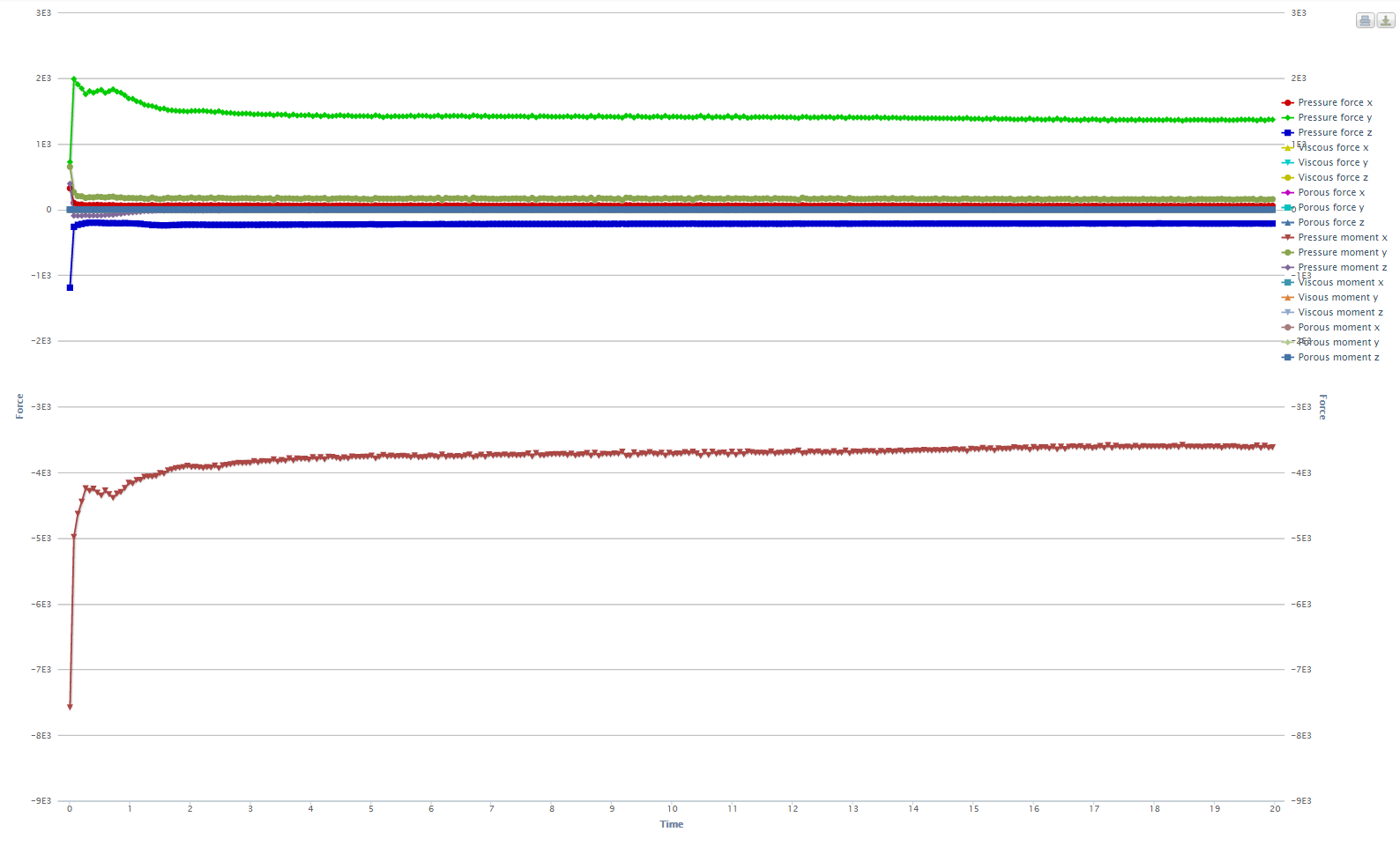
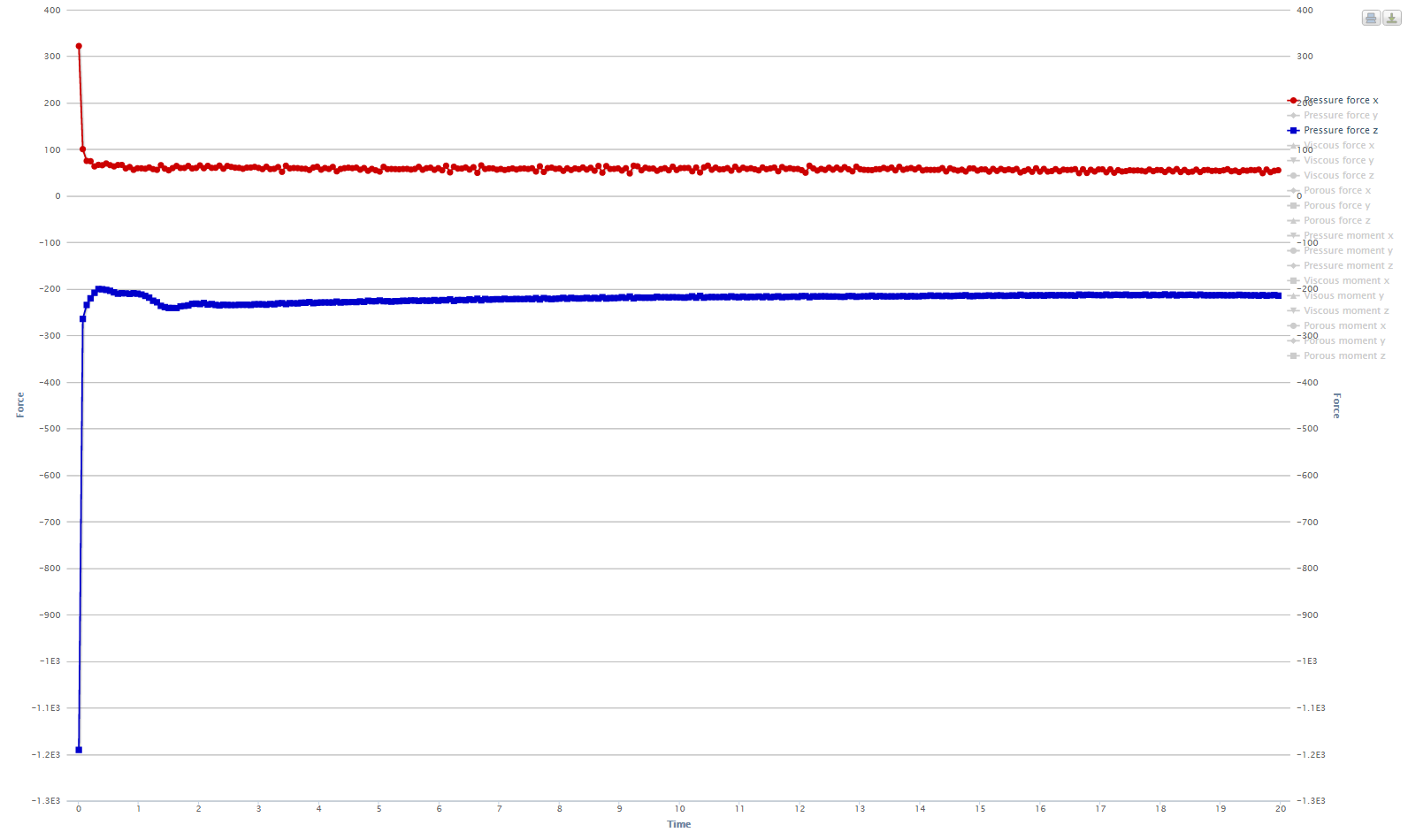
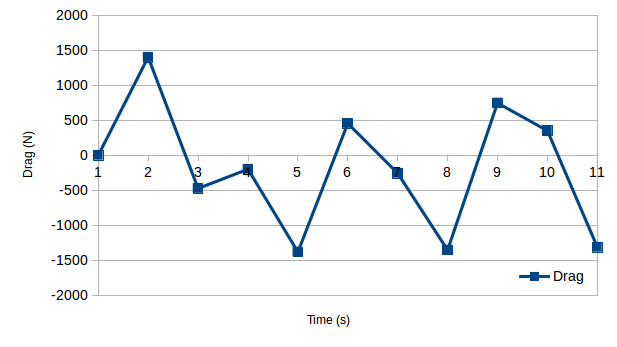
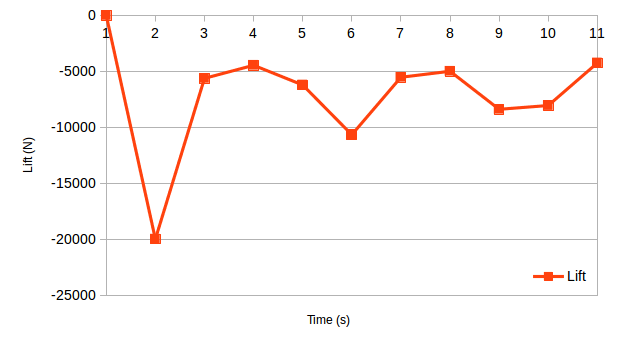
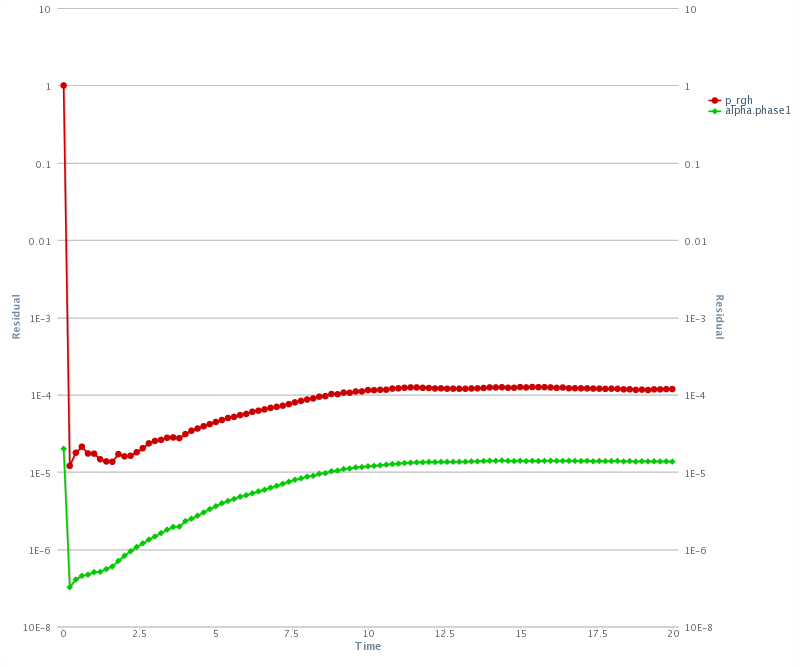
Looking at free surface and velocity field it’s difficult to believe that pressure and phase ratio converged so well.
I agree with @BenLewis - forces at your hull look random.
In terms of formulas: I’ll try to find some time and look for it. If I succeed then I’ll ask you for some more details.
RESULTS PRESENTATION
I’d like to add a few words about results presentation – in general.
- Remember that you see much more than me, @quequen or anybody else, so try to present your material bearing this in mind. For instance: when I presented results of my ROV simulations my main aim was to give basic information about simulation and show correlation rate between experimental and CFD data. I added colourful pictures just to make the topic more vivid, more attractive and eye catching.
Now, when you add your pictures - in my opinion - you can get rid of all that unnecessary elements from it: interface, frames, blank spaces etc. It will make your pictures clearer.
-
Please, for the same case, try to keep to constant ranges if possible (velocity mostly, because it’s something you can control ).
-
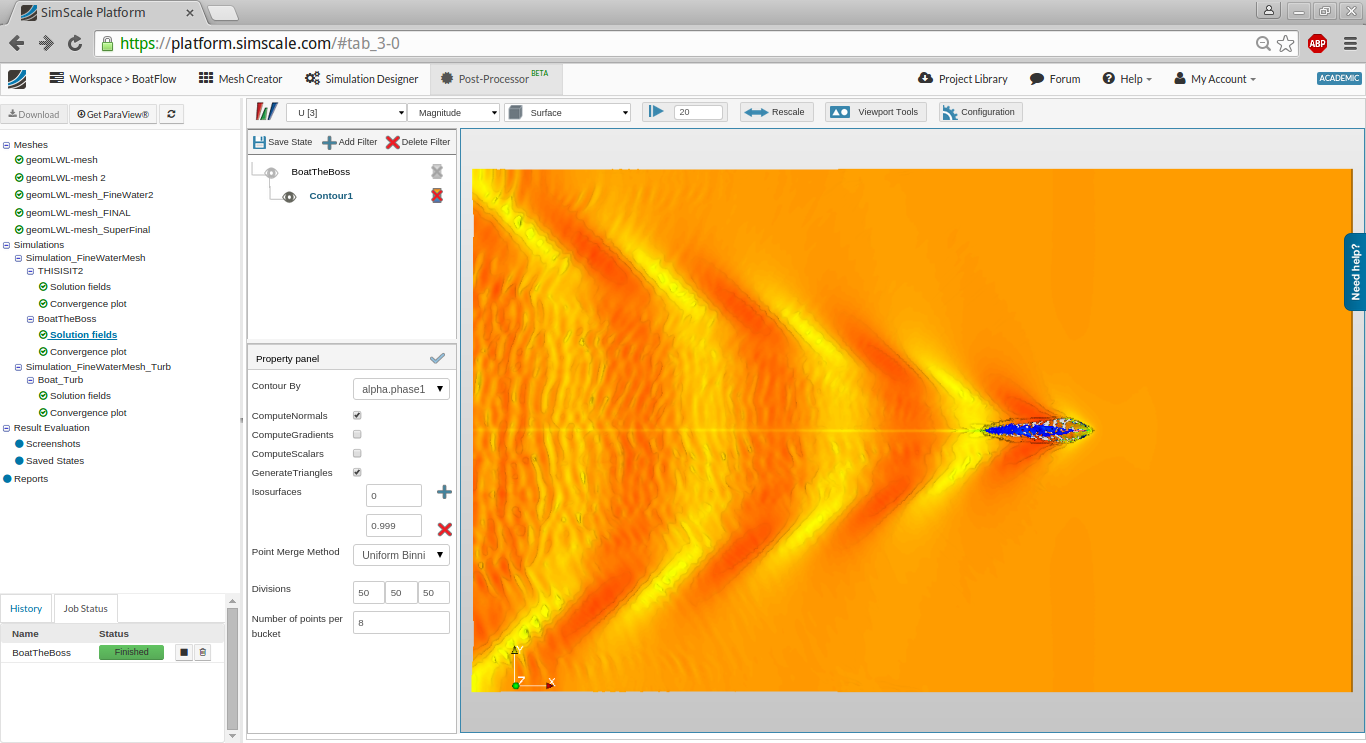
I really like that reversed colour pattern when you present waves coloured with velocity, but…
-
…I’d like to ask you for one more thing here. When you show us waves, plain (not discrete) palette of colours is very good approach. We see smooth velocity changes – super. But when you show cut planes with velocity or pressure fields than it’s not a good idea - at least not always.
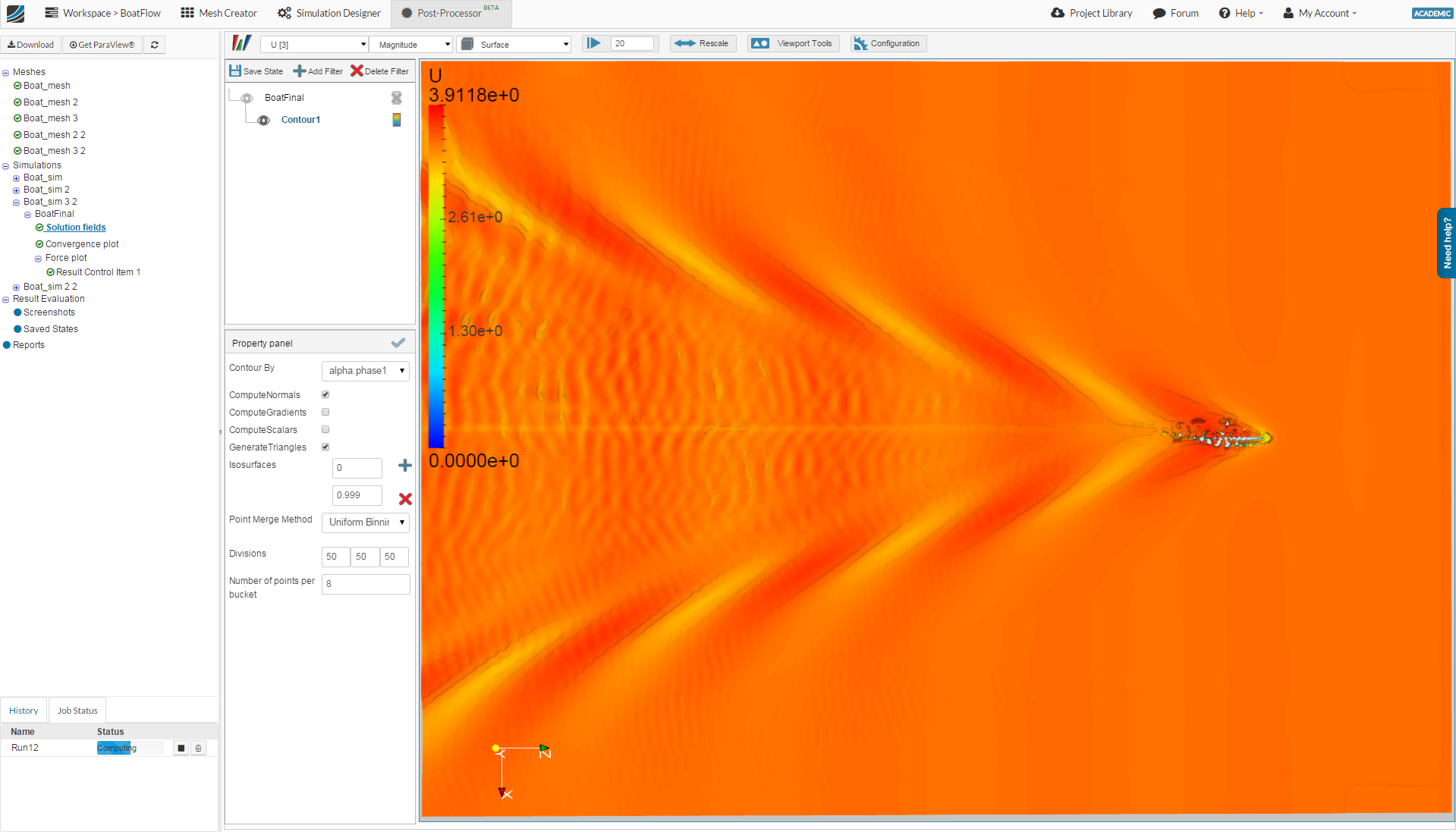
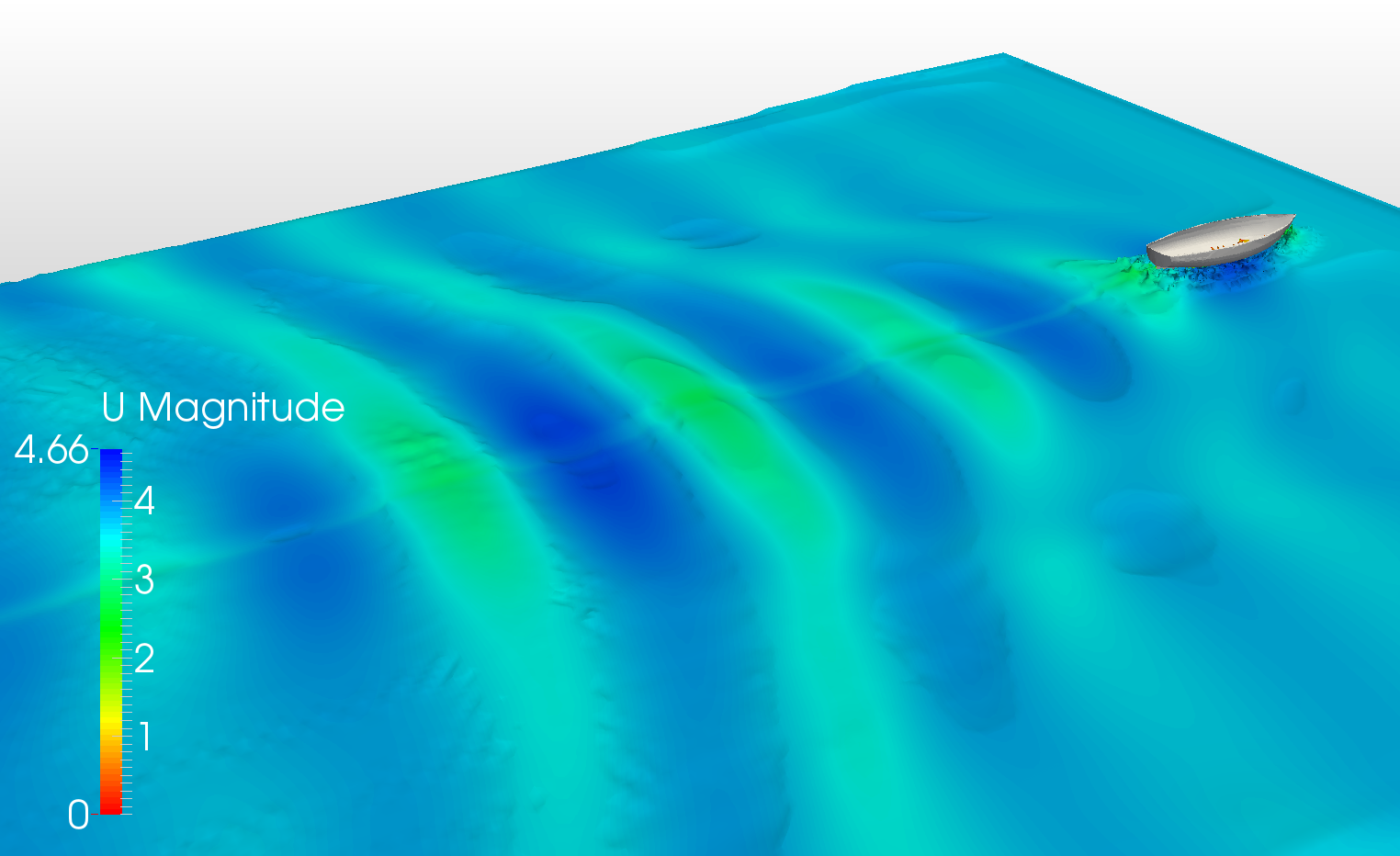
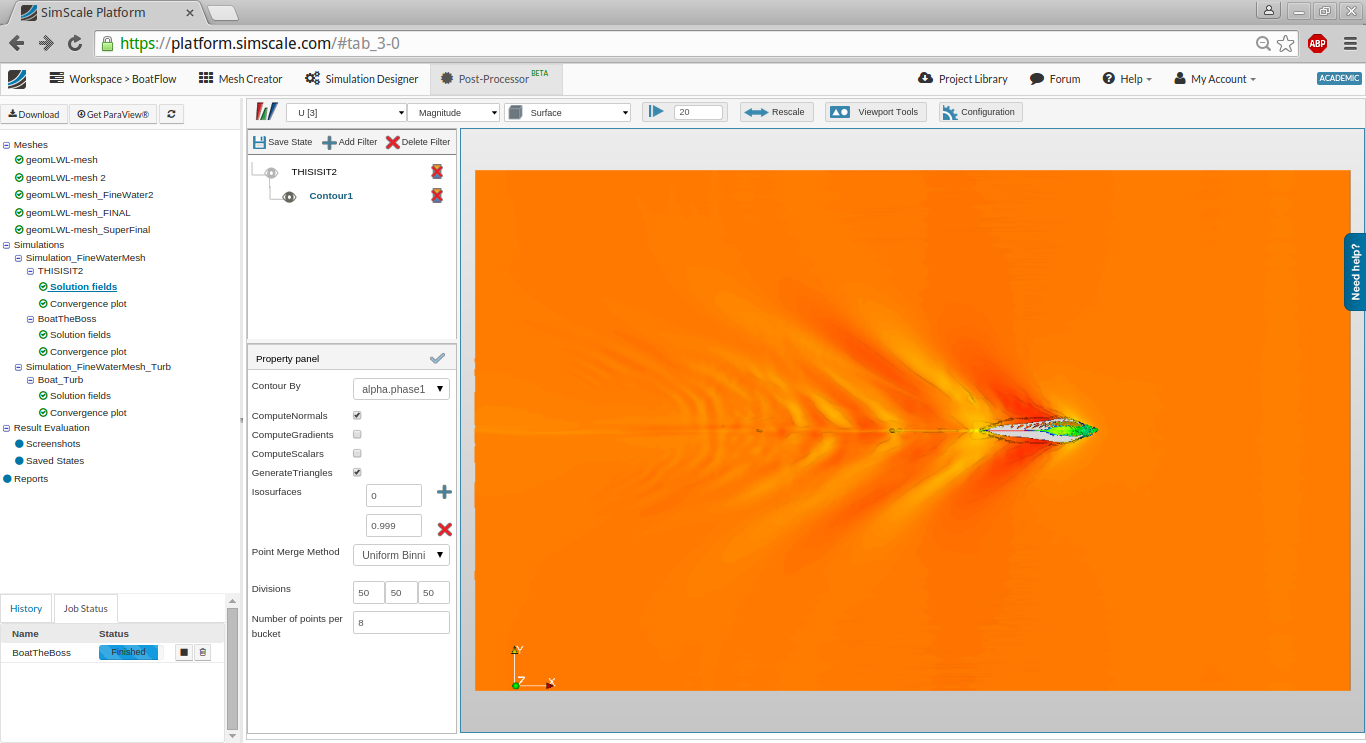
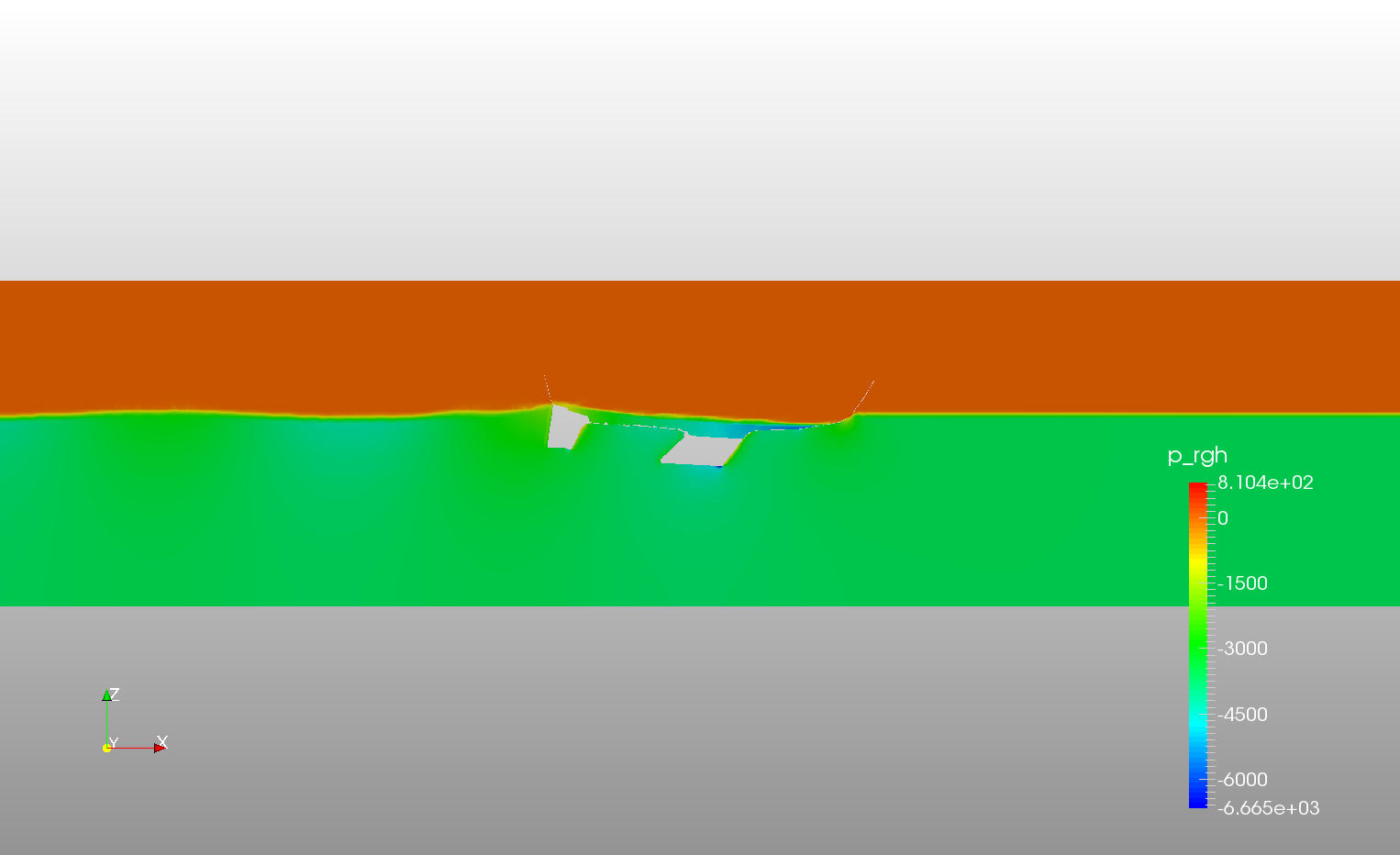
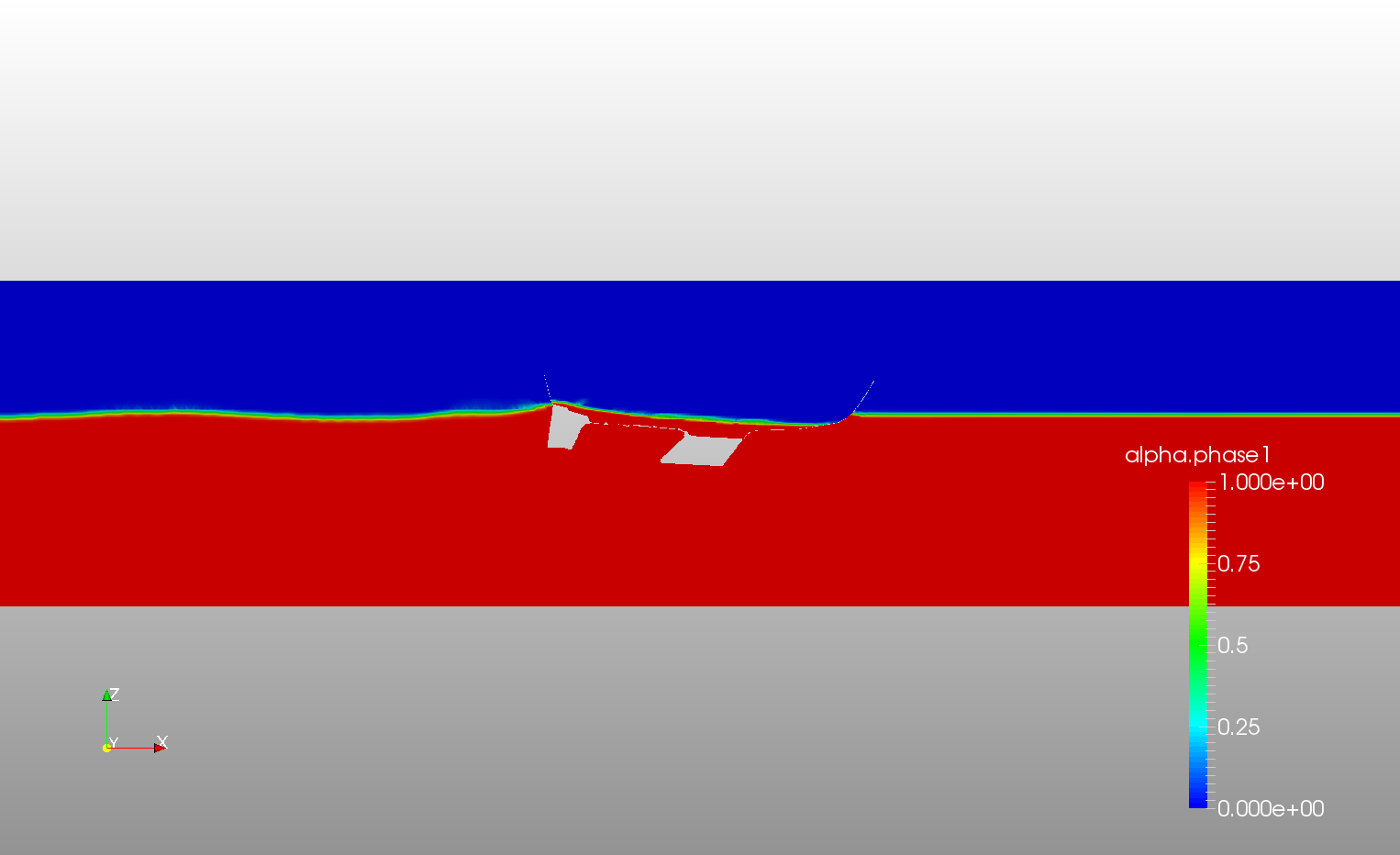
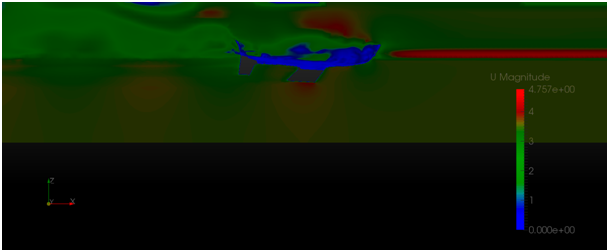
I asked you for cuts as I wanted to check the domain vertical size. From what you presented it looks the domain is both too low and too shallow. In terms of the surface model I’ve already mentioned above and I’ll wait for your reply. Here, however, I’d like to show what the problem is - in my opinion.
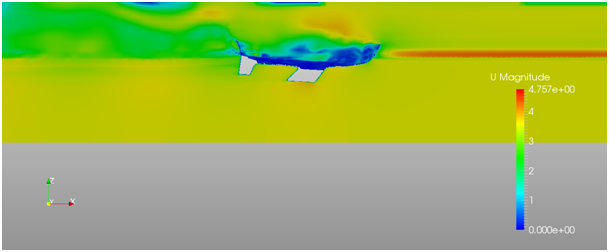
Below is your picture in two versions (I cut unnecessary blank part at the top and kept the one at the bottom to keep the scale bar):
As we can see in the first picture there’s a lot going on in the upper part. I omit boat interior, but there is something at the inlet too (green band in the right top corner). Also just above the water table air velocity is worryingly high – I assume the velocity fields are bonded and homogenous (both have the same value).
I wear glasses but still can see some barely visible colour patches below the hull. So I took photoshop (free photoshop online) and played a bit. After a minute or two I got this. It seems there is a significant interference of domain’s bottom.
Naturally if you’re familiar with your problem, ran a lot of simulations than you have a feeling and you know where you can turn the blind eye. But here, I think the domain should be higher and deeper.
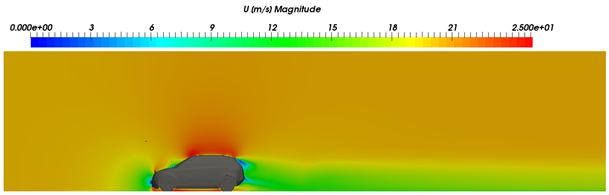
Maybe some example from my compressible test runs:
wide colour range palette
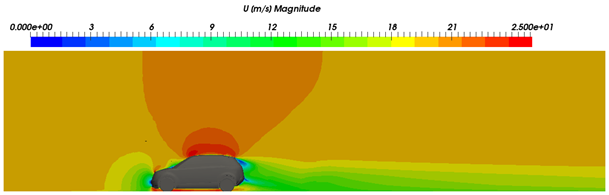
discreet palette
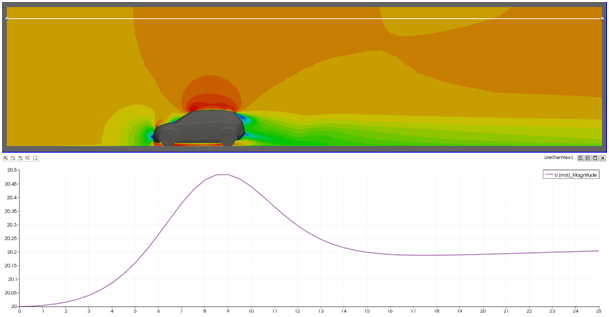
discreet palette with slightly different range plus velocity plot along the line
As you can see the domain seems to be high enough. But when you go deeper you discover that it should be a bit higher and maybe even longer.
Of course here delta is about 2.5% and probably I can ignore it, but still… That’s why they often have such ridiculously big domains.
Let me know what your thoughts are.

 ). However I doubt that this is the main reason behind the incorrect results.
). However I doubt that this is the main reason behind the incorrect results.