Connectors help to reduce the complexity of a multipart structural analysis. This is achieved by defining the connection between multiple parts, without the need for a physical component.
Connectors are supported in the following structural simulation types:
The following connectors are available within SimScale
Pin connectors
Bolt connectors
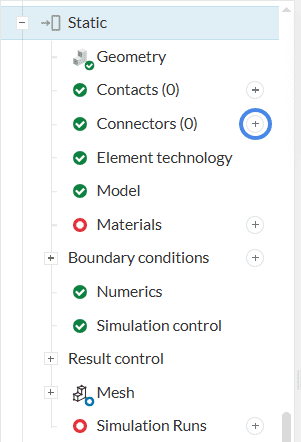
A new connector can be created by clicking the ‘+’ icon in the simulation tree as shown in Figure 1.
Figure 1: Connectors can be found in the simulation tree below Contacts.
Large Displacements
Please be aware that SimScale only allows for small displacements within the connectors. For larger displacements or rotations it is necessary to use physical contacts, between all parts of a connection, including the connecting part.
Pin Connectors
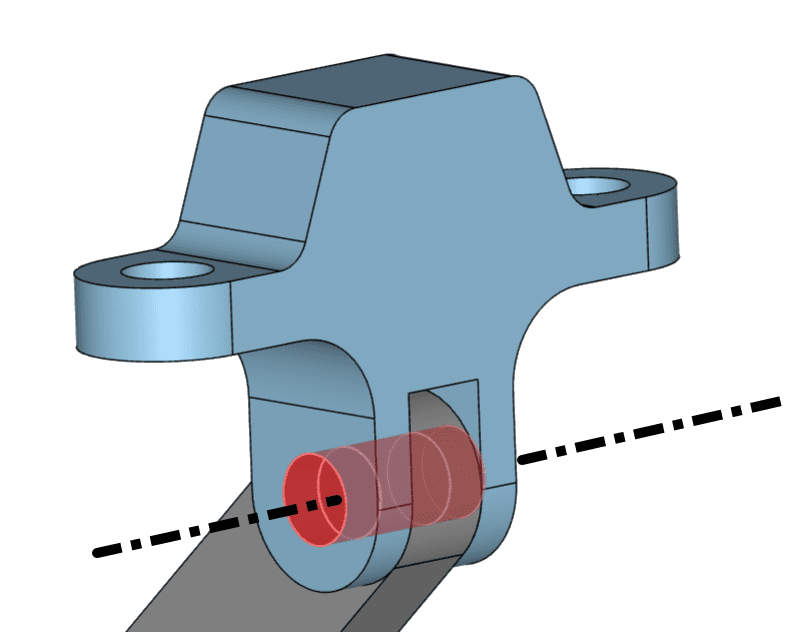
Pin connectors allow the user to replace a physical pin within an assembly with a virtual connection using a combination of kinematic relations and 1D finite elements. The virtual connection mimics the physical behavior of the pin and avoids the need for finely meshed physical parts and complex contact setups.
Figure 2: Example of an assembly where a pin connector can be used to replace a bolt
Important
A separate pin connector item must be defined for each virtual pin.
Pin connectors can only be defined for cylindrical faces.
Usage – Pin connectors
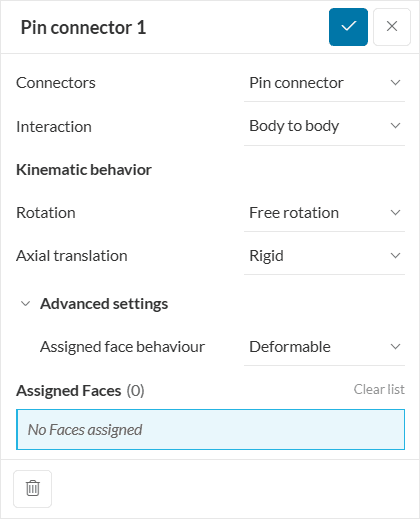
A pin connector can connect multiple bodies around a shared pin axis and the kinematic behavior of the connection can be defined with the settings as shown in Figure 3. This is known as a body to body connection and in this case, the virtual pin will move with the deformation of the bodies.
Alternatively, a pin connector can be used to connect bodies to a pin that is fixed to the ground and this is known as a body to ground connection. Here the virtual pin remains stationary and the connection acts as a global constraint.
The default settings panel for the pin connectors can be seen in Figure 3.
Figure 3: Default settings for Pin connectors
The settings are explained as follows:
Interaction
Body to body: Two or more bodies may be connected to each other via a single virtual pin. The pin will move with the bodies.
Body to ground: Two or more bodies may be connected to the ground via a single virtual pin. The pin remains stationary.
Kinematic Behavior
Rotation
Free rotation: Bodies may freely rotate about the pin axis
Rigid: Rotation of the bodies about the pin axis direction is locked
With torsion spring: Rotation is controlled by a torsion spring stiffness
Axial translation
Rigid: Translation of the bodies in the pin axis direction is locked
Free sliding: Bodies may freely translate along the pin axis
With axial spring: Define an axial spring stiffness for axial movement
Advanced Settings
Deformable: Allows for small deformation of the assigned faces
Undeformable: Allows for no deformation of the assigned faces
Assigning Pin Connector Faces
When assigning the faces of a pin connector please ensure that the faces are concentric.
This means that the faces need to share the same rotational axis. If this condition isn’t fulfilled the simulation will result in an error warning.
Bolt Connectors
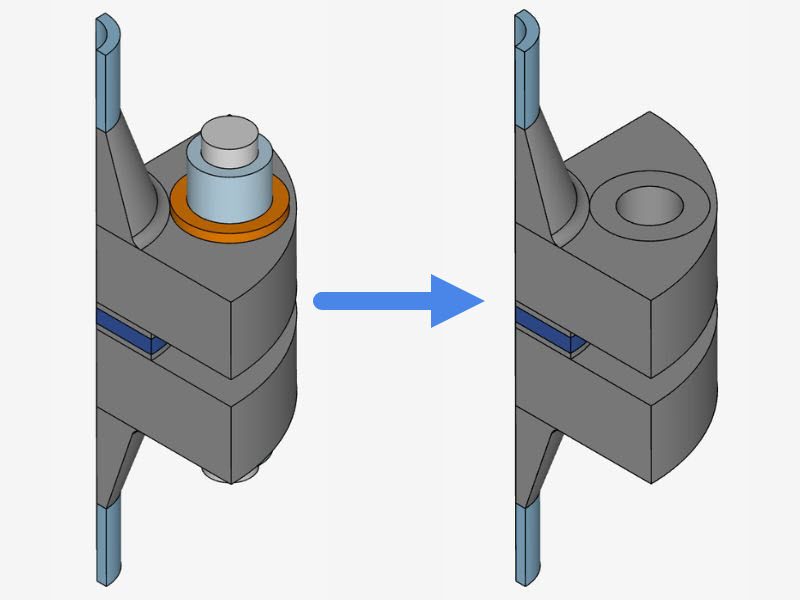
Similar to the pin connectors, bolt connectors are also virtual and make it possible to simulate physical bolts via their replacement by a mathematically equivalent model.
Figure 4: Example of an assembly where a Bolt and nut bolt connector can be used to replace an actual bolt and nut
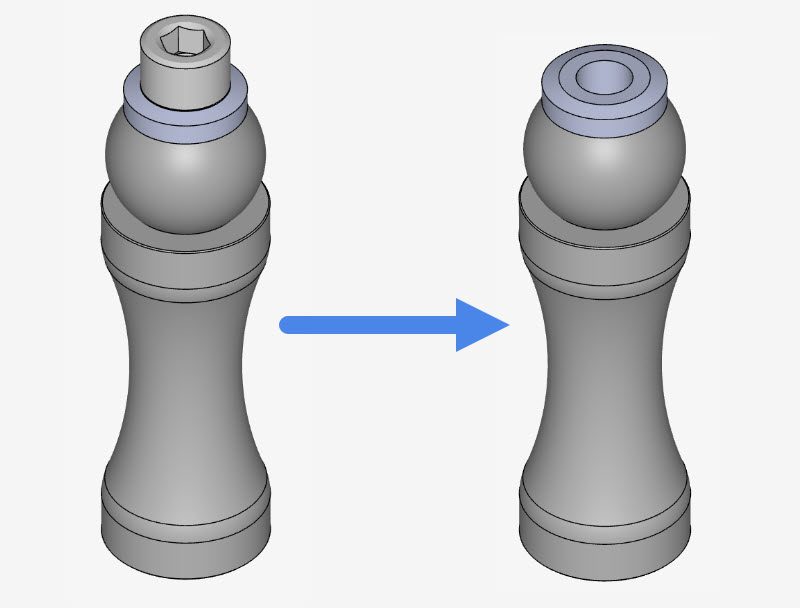
Figure 5: Example of an assembly where a Screw bolt connector can be used to replace an actual bolt and nut
Important
A separate bolt connector item must be defined for each virtual bolt and nut/screw.
Bolt connectors of ‘Screw’ type can only be defined for circular shapes (circumferences, circles, cylinders).
Bolt connectors of ‘Bolt and nut’ type accept other shapes other than the ones mentioned above. However, faces/edges for the bolt head and the nut selections should belong to different bodies.
Usage – Bolt connectors
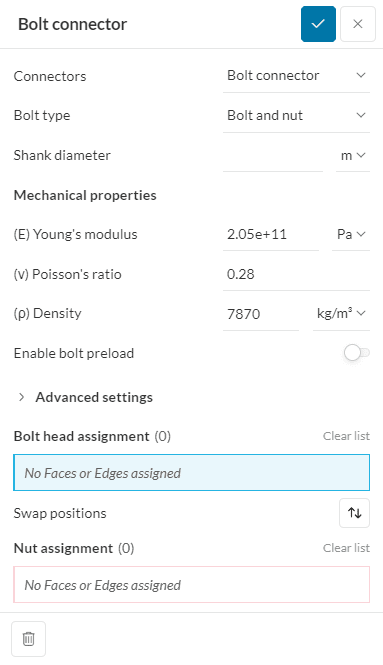
A bolt connector can replace the physically restrained connection of multiple bodies. There are two types of bolts, namely, Bolt and nut and Screw. Figure 6 highlights the default settings for these kinds of connectors as they appear in the Workbench.
Figure 6: Default settings for Bolt connectors
The settings are explained as follows:
Bolt type
Bolt and nut: Replaces a bolt and nut physical connection. Needs one or more surfaces/edges for the bolt and one or more for the nut face. Surfaces/edges must belong to the same body.
Screw: Replaces a screw real connection. Needs one or more surfaces/edges for the bolt’s head and one or more cylindrical surfaces for the threaded face.
Shank diameter: Diameter of the bolt’s shank
Mechanical properties: For more information, take a look at this page.
(E) Young’s Modulus
(v) Poisson’s Ratio
(\(\rho\)) Density
Enable bolt preload: if there’s a preload applied to the bolt, toggle to on. Then, a Force value will be required.
Advanced settings
Assigned face behaviour
Deformable: Allows for small deformation of the assigned faces
Undeformable: Allows for no deformation of the assigned faces
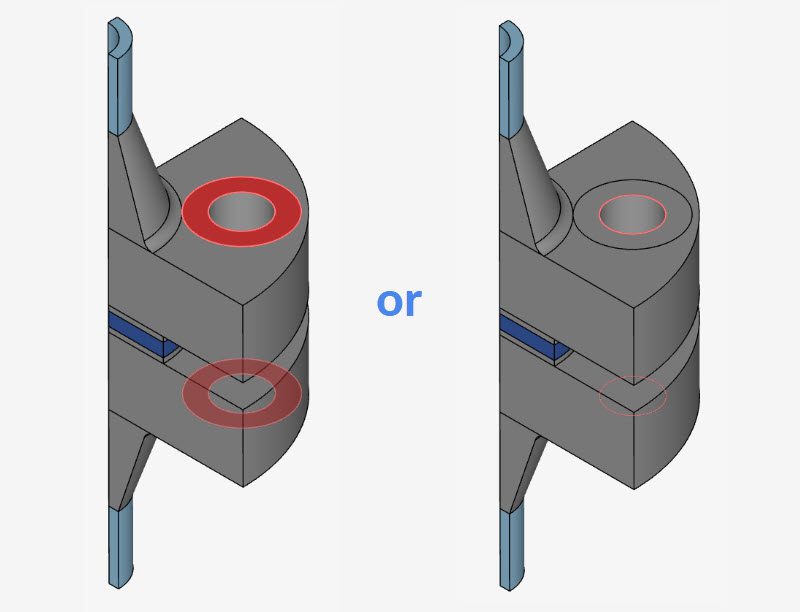
Figure 7: Selection of assigned faces for Bolt and nut connectors (left). Both the bolt head assignment and nut assignment can be replaced by edges (right).
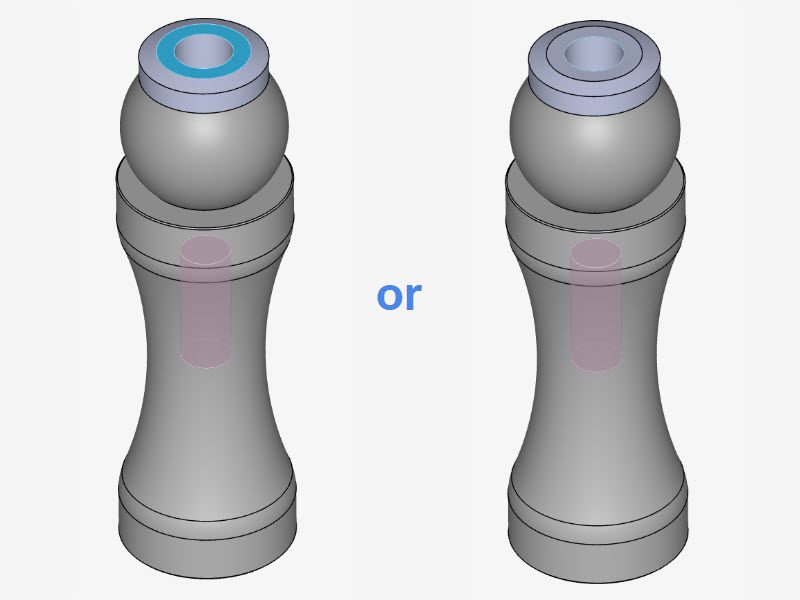
Figure 8: Selection of assigned faces for Screw connectors (left). The bolt head assignment in this case can be replaced by an edge (right). The threaded section assignment always has to be a cylindrical surface.
Assigning Bolt Connector Faces/Edges
When assigning the faces of a bolt connector please ensure that the faces/edges are concentric.
This means that the faces need to share the same rotational axis. If this condition isn’t fulfilled the simulation will result in an error warning.