Documentation
With the Point mass boundary condition, a remotely concentrated mass and inertia can be created and connected to specific faces.
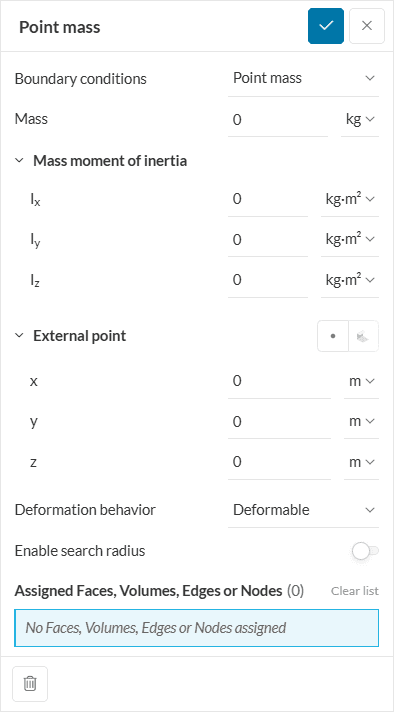
The parameters of the boundary condition to be defined are:
Hint
If the deformable option is used and the number of nodes on the assigned entities is large (>1000), it is advised to use either the MUMPS or PETSC solver instead of Multfront since the performance of Multfront is not optimal for this kind of equations.
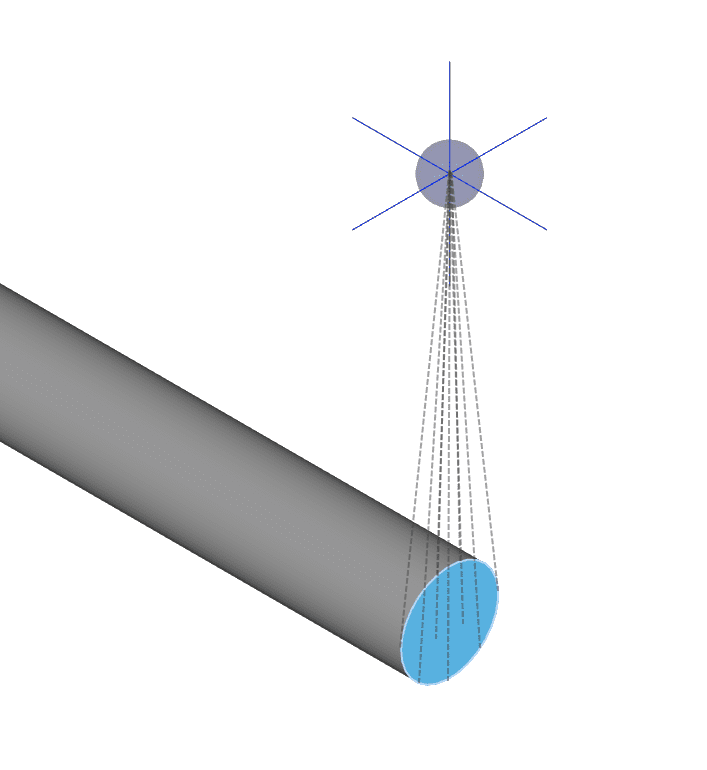
Following is a schematic for a point mass created using the boundary condition. The location is represented by the spherical glyph. The mass is remotely connected to the end face of the beam, highlighted in blue, through elements represented by the dashed lines. As a result, the weight of the point mass is supported by the beam through the end face.
The following analysis types support the usage of this boundary condition:
For more details on the remote connections and the deformation behavior of this boundary condition, please refer to the corresponding sections of the Remote Displacement boundary condition documentation page.
The overall goal of this boundary condition is to replace the effect of connected parts in a model. By using this approach, the simulation can be focused on a smaller set of parts, optimizing simulation resources. Some examples of such effects can be:
The inertial properties of the replaced parts are typically obtained in the CAD program used to create the model. It is important that the global coordinates system is used to compute the coordinates of the center of mass, and that it is not changed before importing the part into SimScale. Also, note that the mass moments of inertia is expressed in a local coordinates system oriented with the global coordinates system, but located at the center of mass.
Last updated: April 7th, 2025
We appreciate and value your feedback.
Sign up for SimScale
and start simulating now